Industrieroboter
Handling-Roboter
Panasonics umfassende Schweißroboter unterstützen MIG-/MAG-/TIG-Schweißprozesse mit einem einzigartigen Technologieansatz: dem TAWERS-Konzept. Was es bedeutet: "Alles von einem Hersteller", ein System einschließlich Roboter, Robotersteuerung, Schweißstromquelle
Key features of Handling-Roboter
Hauptmerkmale
| Verschiedene Typen: bis zu 210 kg transportierbares Gewicht oder bis zu 3150 mm maximale Reichweite |
| Gleiche Controllergröße wie der TM, TL-G4 und WG4 |
| Kompatibel mit externen Achsenreglern |
| Bremsauslöser-Einheiten für jede Roboterachse sind serienmäßig enthalten |
| M-C-Kabel können von 7 bis 30 m als nicht flexibel oder flexibel ausgewählt werden |
Die Panasonic Handling-Roboter bieten innerhalb der bestehenden Roboterproduktpalette ein zusätzliches Anwendungsfeld.
Mit Nutzlastkapazitäten von bis zu 210 kg und einer maximalen Reichweite von 2.597 mm. Diese Roboter bieten verbesserte Vorteile für Produktionsautomatisierungslösungen, die Arbeitsabwicklung erfordern.
In Kombination mit einem Panasonic-Schweißroboter können die Bewegungen beider Roboter mithilfe der "Harmonizer-Funktion" vollständig synchronisiert werden. Diese Funktion stellt sicher, dass die relative Position des Schweißbrenners zum Werkstück automatisch gehalten wird. Die Programmierung der Schweißposition wird so einfach wie das Arbeiten mit einem festen Werkstück, wodurch versetztes Schweißen vermieden werden kann
LA-1800
- 1801 mm
- 26 kg
BXP210L
- 2597 mm
- 210 kg
BX100N
- 2200 mm
- 100 kg
RS015X
- 3150 mm
- 15 kg
Der vielseitige mittelgroße Roboter von Panasonic LA-1800
Zum Handhaben / Montieren / Verarbeiten
- Für Prozesse mit Vorrichtungen oder Werkzeug
- Ermöglicht die Anwendung bei mehreren Prozessen durch die Verwendung eines Werkzeugwechslers
Bedienbar mit Schweißroboter
- Bietet eine optimale Schweißposition im zeitgleichen Betrieb
- Ermöglicht die Anwendung für mehrere Werkstücke durch Wechseln der Vorrichtungen
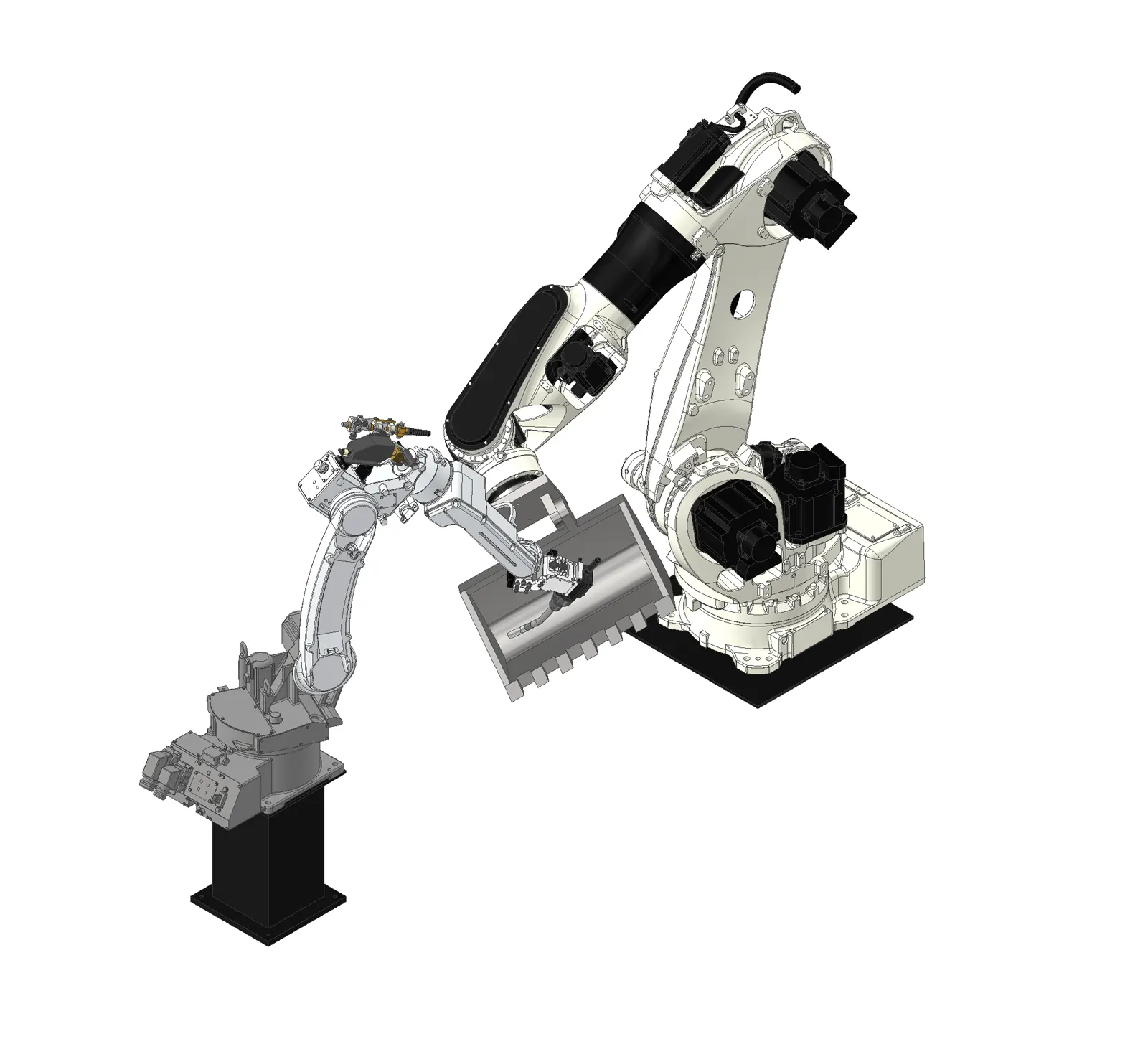
Transfersysteme
In Transfersystemen transportiert der große Roboter Werkstücke und automatisiert die Teileversorgung im Produktionsprozess. Er ist in der Lage, schwere Werkstücke mühelos zu handhaben und so die Betriebseffizienz zu steigern. Dies trägt erheblich zu einer Reduzierung der benötigten Arbeitskräfte bei.
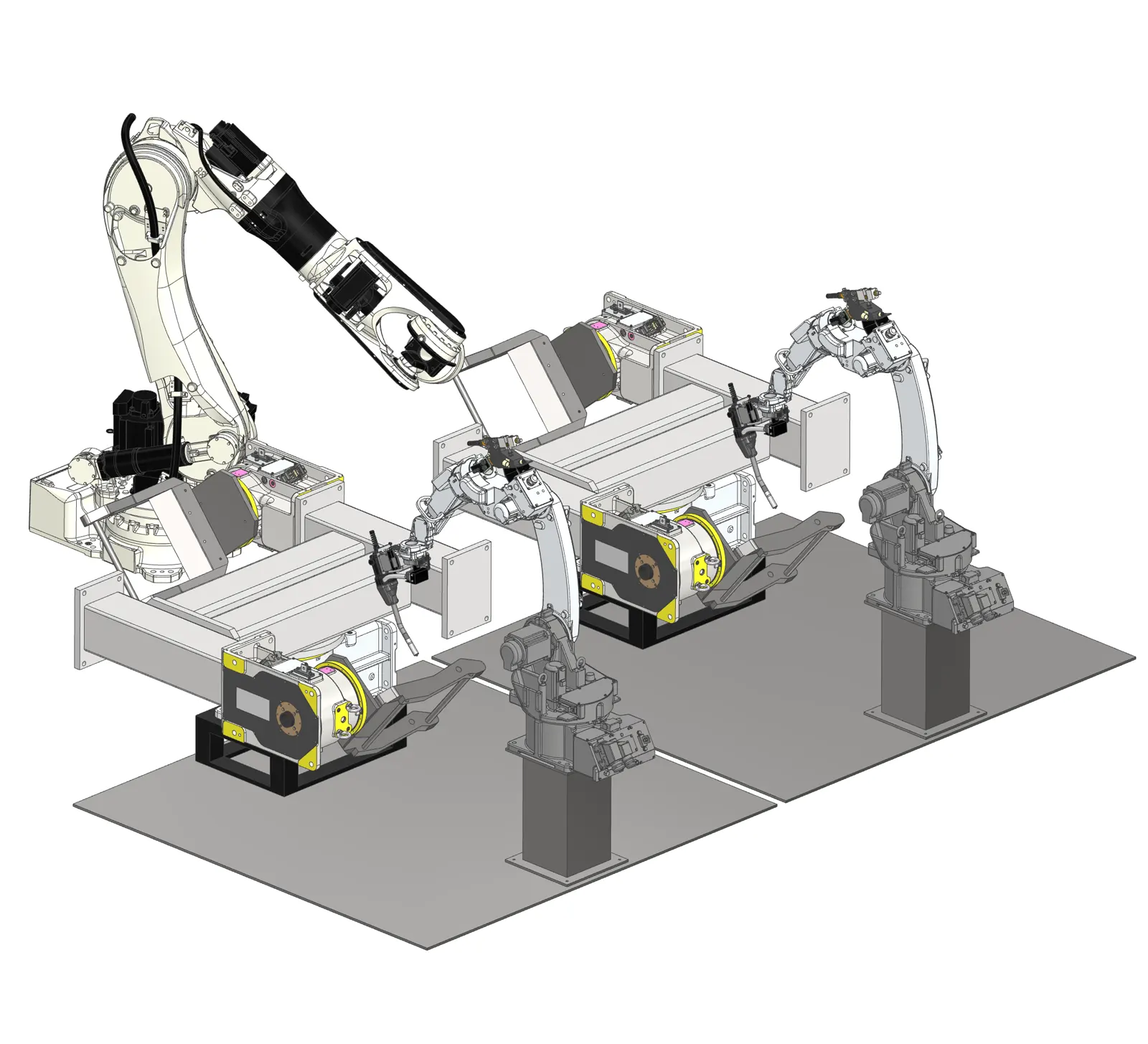
Flexibles multikooperatives Robotersystem
In flexiblen, multikooperativen Robotersystemen hält der große Roboter das Werkstück fest, was den Freiheitsgrad bei Positionierung und Ausrichtung erheblich erhöht. Dadurch können optimale Schweißpositionen erreicht werden, was zu einer konstant stabilen Qualität führt. Darüber hinaus unterstützt das System komplex geformte Werkstücke durch seine multioperative Funktionalität.
| Name | LA-1800 G4 | BX100N-G4/WG4 | BXP210L-G4 | RS015X-G4/WG4 | |
| Transportable Masse | 26 kg | 100 kg | 210 kg | 15 kg | |
| Maximale Reichweite | 1.801 mm | 2.200 mm | 2.597 mm | 3.150 mm | |
| Anwendung | Transfer | Ja | Ja | Ja | (Ja) |
| Zusammenarbeit zwischen Robotern | Ja | Ja | Ja | Ja | |
| Hauptanwendung | Handhabung/Schweißen | Handhabung/(Schweißen) | Handhabung | Schweißen/(Handhabung) | |
| Serie | LA | BX | BXP | RS | |
| Modell | LA-1800 | BX100N | BXP210L | RS015X | |
| Arbeitsbereich [mm] | 1,801 | 2,200 | 2,597 | 3,150 | |
| Nutzlast [kg] | 26 | 100 | 210 kg | 15 | |
| Verwendung | Handhabung | Ja | |||
| Roboterharmonie | Ja | ||||
| Lichtbogenschweißen | Ja | Ja,1 | Ja,2 | Ja | |
| Punktschweißen | - | - | Verfügbar | - | |
| Arbeitsbereich | RT (Drehbarer Trunk) | ±170° | ±160° | -155° ~ +145° | ±180° |
| UA (Oberarm) | -90º ~ +165º | -65º ~ +120º | -60º ~ +76º | -105º ~ +140º | |
| FA (Unterarm) | -205º ~ +270º | -77º ~ +90º | -75º ~ +90º | -155º ~ +135º | |
| RW (Drehend) | ±270º | ±210º | ±360º | ||
| BW (Gebeugt) | ±130º | ±125º | ±145º | ||
| TW (Gedreht) | ±400º | ±210º | ±360º | ||
| Max. Bewegungsgeschwindigkeit | RT | 201º/s | 135º/s | 140º/s | 180º/s |
| UA | 199º/s | 110º/s | 105º/s | 180º/s | |
| FA | 218º/s | 140º/s | 115º/s | 200º/s | |
| RW | 434º/s | 200º/s | 140º/s | 410º/s | |
| BW | 450º/s | 200º/s | 135º/s | 360º/s | |
| TW | 720º/s | 300º/s | 240º/s | 610º/s | |
| Positionswiederholbarkeit [mm] | ±0,07 oder weniger | ±0,06 | |||
| Gewicht (ca.) [kg] | 320 | 740 | 870 | 545 | |
| Umgebungstemperatur | 0 ºC – 45 ºC | ||||
| Luftfeuchtigkeit | 20% RH – 90% RH | 35 % RH – 85 % RH | |||
| Einbaulage | Boden / Decke | Boden | |||
| Schutzart | IP40-Äquivalent | Handgelenksteil-Äquivalent IP67 Arm-Teil IP54-Äquivalent | Handgelenksteil-Äquivalent IP67 Arm-Teil IP65-Äquivalent | ||
Ressourcen & Downloads
Sorry there was an error...
The files you selected could not be downloaded as they do not exist.
Sie haben Dokument ausgewählt..
Continue to select additional items or download selected items together as a zip file.
Sie haben 1 Dokument ausgewählt.
Wählen Sie weitere Dokumente aus oder laden Sie die aktuelle Auswahl herunter.
Full specifications
| Payload | YS-080G3: 80kgHS-220G3: 200kg |
|---|---|
| Repeatability | YS-080G3: ± 0.15mmHS-220G3: ± 0.06mm |
| Weight | YS-080G3: 620kgHS-220G3: 955kg |
| Max. Reach | YS-080G3: 2240mmHS-220G3: 2666mm |
| Max. Working Range Swivel | YS-080G3: ± 180ºHS-220G3: ± 180º |
| Max. Working Range For/Backward | YS-080G3: -90º ~ +155ºHS-220G3: -65º ~ +80º |
| Max. Working Range Up/Downward | YS-080G3: -180º ~ +230º HS-220G3: +230º ~ +130º |
| Max. Working Range Rotation | YS-080G3: ± 360º HS-220G3: ± 360º |
| Max. Working Range Bending | YS-080G3: ± 125ºHS-220G3: ± 128º |
| Max. Working Range Twisting | YS-080G3: ± 360ºHS-220G3: ± 360º |
| Max. Speed Swivel | YS-080G3: 170º/sHS-220G3: 120º/s |
| Max. Speed For/Backward | YS-080G3: 140º/sHS-220G3: 105º/s |
| Max. Speed Up/Downward | YS-080G3: 160º/sHS-220G3: 115º/s |
| Max. Speed Rotation | YS-080G3: 230º/sHS-220G3: 145º/s |
| Max. Speed Bending | YS-080G3: 230º/sHS-220G3: 145º/s |
| Max. Speed Twisting | YS-080G3: 624º/sHS-220G3: 624º/s |
| Allowable Moment Rotation | YS-080G3: 400NmHS-220G3: 1420Nm |
| Allowable Moment Bending | YS-080G3: 400NmHS-220G3: 1420Nm |
| Allowable Moment Twisting | YS-080G3: 200NmHS-220G3: 770Nm |
Seite teilen
Share this link via:
Twitter
LinkedIn
Xing
Facebook
Or copy link: